"각도거리"의 두 판 사이의 차이
(새 문서: 각도거리 <ol> <li>링크 <ol> <li> 전자부품 <ol> <li> 거리 <ol> <li> 각도거리 <li> 레이저거리 </ol> </ol> </ol> <li>샤프 광 거리센서, GP2Y0A4...) |
잔글 |
||
| (같은 사용자의 중간 판 4개는 보이지 않습니다) | |||
| 1번째 줄: | 1번째 줄: | ||
각도거리 | 각도거리 | ||
<ol> | <ol> | ||
| − | <li> | + | <li> [[전자부품]] |
<ol> | <ol> | ||
| − | <li> | + | <li>센서 |
<ol> | <ol> | ||
<li> [[거리]] | <li> [[거리]] | ||
| + | <li> [[PD-IC]] | ||
<ol> | <ol> | ||
| − | <li> [[각도거리]] | + | <li> [[각도거리]], [[PSD]] - 이 페이지 |
| − | |||
</ol> | </ol> | ||
| + | </ol> | ||
| + | <li>참고 | ||
| + | <ol> | ||
| + | <li> [[포토센서]] | ||
| + | <li> [[홀소자]], [[홀엘리먼트]] | ||
| + | </ol> | ||
| + | </ol> | ||
| + | <li>기술 | ||
| + | <ol> | ||
| + | <li>PSD; Position-sensitive diode(detector=device) | ||
| + | <ol> | ||
| + | <li>실리콘 칩 바닥을 음극 cathode로 두고, 투명 저항막 좌우에 양극 anode1,2를 연결한다. | ||
| + | <li>빔 위치가 어느 한 쪽 양극에 가까울수록 저항이 낮아진다. | ||
| + | <li> | ||
| + | </ol> | ||
| + | <li>위키페디아 https://en.wikipedia.org/wiki/Position_sensitive_device | ||
| + | </ol> | ||
| + | <li>PSD | ||
| + | <ol> | ||
| + | <li> [[MPRT]]에서 회전각도 엔코더용 | ||
| + | <ol> | ||
| + | <li>엔코더 | ||
| + | <gallery> | ||
| + | image:mprt2000cm01_038.jpg | ||
| + | image:mprt2000cm01_039.jpg | ||
| + | </gallery> | ||
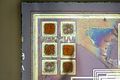
| + | <li> [[각도거리]]에 사용되는 PSD | ||
| + | <gallery> | ||
| + | image:mprt2000cm01_043.jpg | ||
| + | image:mprt2000cm01_044.jpg | ||
| + | image:mprt2000cm01_045.jpg | ||
| + | </gallery> | ||
| + | </ol> | ||
| + | <li>참고: [[PD-IC]] 일수도 있는데, | ||
| + | <ol> | ||
| + | <li> [[SL-C460W, 레이저 스캐닝 유닛]]에서 | ||
| + | <gallery> | ||
| + | image:lsu_ld1_013.jpg | PD+IC | ||
| + | </gallery> | ||
</ol> | </ol> | ||
</ol> | </ol> | ||
| 31번째 줄: | 70번째 줄: | ||
<li>OP Amp를 사용한 결과 | <li>OP Amp를 사용한 결과 | ||
</ol> | </ol> | ||
| − | |||
| − | |||
<li>기본 측정 | <li>기본 측정 | ||
<ol> | <ol> | ||
| 49번째 줄: | 86번째 줄: | ||
</gallery> | </gallery> | ||
</ol> | </ol> | ||
| + | <li>보유품 보관 | ||
| + | <gallery> | ||
| + | image:gp2y0a41_013.jpg | 2020/02/23, 가습기 프로젝트 상자에 넣어둠 | ||
| + | </gallery> | ||
| + | <li>분해 | ||
| + | <ol> | ||
<li>샘플 #1 | <li>샘플 #1 | ||
<ol> | <ol> | ||
| 80번째 줄: | 123번째 줄: | ||
image:gp2y0a41_2_007.jpg | image:gp2y0a41_2_007.jpg | ||
image:gp2y0a41_2_008.jpg | image:gp2y0a41_2_008.jpg | ||
| + | </gallery> | ||
| + | </ol> | ||
| + | <li>샘플 #3 | ||
| + | <ol> | ||
| + | <li>이중 사출 - 적외선 통과를 위한 투명수지 + 열적, 기계적 강도를 위한 유리섬유 보강 수지 | ||
| + | <gallery> | ||
| + | image:gp2y0a41_2_009.jpg | ||
| + | image:gp2y0a41_2_010.jpg | ||
| + | </gallery> | ||
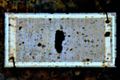
| + | <li>센서 - 질산에 넣어 투명수지를 제거한 후 | ||
| + | <gallery> | ||
| + | image:gp2y0a41_2_011.jpg | ||
| + | image:gp2y0a41_2_012.jpg | ||
| + | </gallery> | ||
| + | <li>신호처리 IC - 질산에 넣어 투명수지를 제거한 후 | ||
| + | <gallery> | ||
| + | image:gp2y0a41_2_013.jpg | ||
| + | image:gp2y0a41_2_014.jpg | ||
| + | image:gp2y0a41_2_015.jpg | 1B8609 | ||
| + | image:gp2y0a41_2_016.jpg | 바늘로 찍어 검사한 자국 | ||
</gallery> | </gallery> | ||
</ol> | </ol> | ||
2024년 12월 10일 (화) 15:44 기준 최신판
각도거리
- 전자부품
- 기술
- PSD; Position-sensitive diode(detector=device)
- 실리콘 칩 바닥을 음극 cathode로 두고, 투명 저항막 좌우에 양극 anode1,2를 연결한다.
- 빔 위치가 어느 한 쪽 양극에 가까울수록 저항이 낮아진다.
- 위키페디아 https://en.wikipedia.org/wiki/Position_sensitive_device
- PSD; Position-sensitive diode(detector=device)
- PSD
- MPRT에서 회전각도 엔코더용
- 엔코더
- 각도거리에 사용되는 PSD
- 엔코더
- 참고: PD-IC 일수도 있는데,
- SL-C460W, 레이저 스캐닝 유닛에서

PD+IC
- SL-C460W, 레이저 스캐닝 유닛에서
- MPRT에서 회전각도 엔코더용
- 샤프 광 거리센서, GP2Y0A41SK0F, Analog output type distance measuring Sensor, Sharp
- 기술 자료 및 조사
- 제품 포장지에
- 규격서 - 10p
- 콘넥터 JST Trading Company S3B-PH, 샘플전자에서 7,200원 판매
- 4~30cm, L=30cm에서 0.4V, 4cm에서 +2.25V 상승
- 수조에서 시간에 따른 측정 데이터 정리
- 측정 엑셀 데이터
- OP Amp를 사용한 결과
- 제품 포장지에
- 기본 측정
- 실험 사진

XY 스테이지위에서

0mm 거리

캘리퍼스로 거리 조정

반사판을 붙이고. 각도를 조정
- 거리 측정 데이터 정리 , 측정 엑셀 데이터
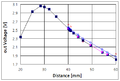
거리-전압(샘플 2개)

각도 설명

각도-전압
- 실험 사진
- 보유품 보관

2020/02/23, 가습기 프로젝트 상자에 넣어둠
- 분해
- 샘플 #1
- 왼쪽 발광부(light emitter), 오른쪽 수광부(light detector)
- 수광부 확대
투명 수지 보호막


- 왼쪽 발광부(light emitter), 오른쪽 수광부(light detector)
- 샘플 #2
- 외형

크기

Sharp Y0A41S
- 분해
- 수광부 확대
- 외형
- 샘플 #3
- 이중 사출 - 적외선 통과를 위한 투명수지 + 열적, 기계적 강도를 위한 유리섬유 보강 수지
- 센서 - 질산에 넣어 투명수지를 제거한 후
- 신호처리 IC - 질산에 넣어 투명수지를 제거한 후


1B8609

바늘로 찍어 검사한 자국
- 이중 사출 - 적외선 통과를 위한 투명수지 + 열적, 기계적 강도를 위한 유리섬유 보강 수지
- 샘플 #1
- 기술 자료 및 조사


































