"수평형 LRA 진동모터"의 두 판 사이의 차이
잔글 |
잔글 |
||
| (같은 사용자의 중간 판 4개는 보이지 않습니다) | |||
| 1번째 줄: | 1번째 줄: | ||
수평형 LRA 진동모터 | 수평형 LRA 진동모터 | ||
| − | |||
| − | |||
<ol> | <ol> | ||
<li> [[전자부품]] | <li> [[전자부품]] | ||
| 9번째 줄: | 7번째 줄: | ||
<li> [[LRA 진동모터]] | <li> [[LRA 진동모터]] | ||
<ol> | <ol> | ||
| − | <li> [[수평형]] | + | <li> [[수평형 LRA 진동모터]] - 이 페이지 |
| − | <li> [[수직형]] | + | <li> [[수직형 LRA 진동모터]] |
</ol> | </ol> | ||
<li> [[ERM 진동모터]] | <li> [[ERM 진동모터]] | ||
<ol> | <ol> | ||
| − | <li> [[코인타입]] | + | <li> [[코인타입 ERM 진동모터]] |
| − | <li> [[바타입]] | + | <li> [[바타입 ERM 진동모터]] |
</ol> | </ol> | ||
<li> [[압전체 진동모터]] | <li> [[압전체 진동모터]] | ||
| − | |||
</ol> | </ol> | ||
</ol> | </ol> | ||
| 92번째 줄: | 89번째 줄: | ||
<gallery> | <gallery> | ||
image:lra_h01_020.jpg | image:lra_h01_020.jpg | ||
| − | image:lra_h01_021.jpg | 영구자석 위치 측정용 [[홀소자]]. "위치를 의도대로 제어"할 수 있다. | + | image:lra_h01_021.jpg | [[영구자석]] 위치 측정용 [[홀소자]]. "위치를 의도대로 제어"할 수 있다. |
image:lra_h01_022.jpg | 상하 [[VCM]]은 한 가운데 있다. | image:lra_h01_022.jpg | 상하 [[VCM]]은 한 가운데 있다. | ||
</gallery> | </gallery> | ||
| 98번째 줄: | 95번째 줄: | ||
<gallery> | <gallery> | ||
image:lra_h01_017.jpg | image:lra_h01_017.jpg | ||
| − | image:lra_h01_023.jpg | 영구자석 밑에 말라진 윤활유? | + | image:lra_h01_023.jpg | [[영구자석]] 밑에 말라진 [[윤활유]]? |
image:lra_h01_024.jpg | image:lra_h01_024.jpg | ||
| − | image:lra_h01_025.jpg | 비교적 잘 닦이는 것으로 보아, 자성유체가 아니다. | + | image:lra_h01_025.jpg | 비교적 잘 닦이는 것으로 보아, 자성유체가 아니다. [[자석]]이 녹슬지 말라고 방청유를 바른듯 |
image:lra_h01_026.jpg | 레이저로 표면 거칠기 가공을 했다. 이유를 모르겠다. (이 거친면을 풀로 발라야야 한다면 뒤집혀 조립되었다.) | image:lra_h01_026.jpg | 레이저로 표면 거칠기 가공을 했다. 이유를 모르겠다. (이 거친면을 풀로 발라야야 한다면 뒤집혀 조립되었다.) | ||
</gallery> | </gallery> | ||
| 108번째 줄: | 105번째 줄: | ||
image:lra_h01_028.jpg | 용접이 약하게 되어 있어 비교적 쉽게 떨어진다. 풀칠을 했다. | image:lra_h01_028.jpg | 용접이 약하게 되어 있어 비교적 쉽게 떨어진다. 풀칠을 했다. | ||
</gallery> | </gallery> | ||
| − | <li>[[자석]] 에칭(Nd | + | <li> [[자석]] 에칭(Nd [[자석]]일 듯) |
<gallery> | <gallery> | ||
| − | image:lra_h01_029.jpg | 질산에 | + | image:lra_h01_029.jpg | 질산에 [[자석]]은 쉽게 애칭된다. |
image:lra_h01_030.jpg | image:lra_h01_030.jpg | ||
</gallery> | </gallery> | ||
| 149번째 줄: | 146번째 줄: | ||
<li>외형 및 측정을 위해 전선 납땜 | <li>외형 및 측정을 위해 전선 납땜 | ||
<gallery> | <gallery> | ||
| − | image:lra_h02_001.jpg | + | image:lra_h02_001.jpg | Device Parts 판매상 마크 스티커가 붙어 있다. |
</gallery> | </gallery> | ||
<li>LCR 미터로 Z-theta를 측정한 엑셀데이터 | <li>LCR 미터로 Z-theta를 측정한 엑셀데이터 | ||
| 164번째 줄: | 161번째 줄: | ||
</gallery> | </gallery> | ||
</ol> | </ol> | ||
| − | <li | + | <li>샘플-3, Apple Part No.: 610-00636 / GH7GY830DFW0 / 0000L2+85BD3 로 레이저마킹품 |
<ol> | <ol> | ||
<li>iPhone 15 Prp Max용 Haptic Engine | <li>iPhone 15 Prp Max용 Haptic Engine | ||
| 175번째 줄: | 172번째 줄: | ||
image:lra_h03_001.jpg | TAPTIC engine | image:lra_h03_001.jpg | TAPTIC engine | ||
image:lra_h03_002.jpg | 레이저마킹 및 파랑잉크도장은 | image:lra_h03_002.jpg | 레이저마킹 및 파랑잉크도장은 | ||
| − | image:lra_h03_002_001.jpg | | + | image:lra_h03_002_001.jpg | Device Parts 라는 온라인 판매상 회사 마크이다. |
</gallery> | </gallery> | ||
<li>테이프를 뜯어보면 | <li>테이프를 뜯어보면 | ||
| 270번째 줄: | 267번째 줄: | ||
<li>진동체를 조립한 스프링 강성은 진동의 좌우 대칭으로 만들어져 있다. | <li>진동체를 조립한 스프링 강성은 진동의 좌우 대칭으로 만들어져 있다. | ||
<li>(당연히) 기계적 진동폭이 작으면 고유진동수가 높아지고, 진동폭이 커지면 (탄성계수가 커져) 고유진동수가 낮아진다. | <li>(당연히) 기계적 진동폭이 작으면 고유진동수가 높아지고, 진동폭이 커지면 (탄성계수가 커져) 고유진동수가 낮아진다. | ||
| + | <ol> | ||
| + | </ol> | ||
| + | <li>샘플-4, 삼성 갤럭시 A54, A546 모델용 | ||
| + | <ol> | ||
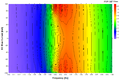
| + | <li>임피던스 측정 엑셀 데이터 | ||
| + | <ol> | ||
| + | <li>그래프 | ||
| + | <gallery> | ||
| + | image:lra_h04_012.png | ||
| + | image:lra_h04_013.png | ||
| + | </gallery> | ||
| + | <li>의견 | ||
| + | <ol> | ||
| + | <li>10Vosc 전압에도 벽에 부딪히지 않는다. | ||
| + | <ol> | ||
| + | <li>+-100mA 바이어스 전류를 추가로 인가해도 크게 벽에 부딪히지 않는다. | ||
| + | <li>-100mA 바이어스쪽이 +100mA에 비해 그래프가 많이 달라졌기 때문에 비대칭 조립되었다. (아마, 댐핑 고무 때문일 것이다.) | ||
| + | </ol> | ||
| + | <li>공진임피던스가 10Ω이므로 10Vosc가하면 1A흐른다. DC bias로 -0.1A 또는 +0.1A 추가해도 대세에 지장이 없다. | ||
| + | </ol> | ||
| + | </ol> | ||
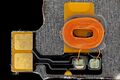
| + | <li>외관, AS129484, 제조회사는 중국 AAC로 추정한다. | ||
| + | <gallery> | ||
| + | image:lra_h04_001.jpg | ||
| + | </gallery> | ||
| + | <li>용접된 4변을 그라인더로 갈아내면 | ||
| + | <gallery> | ||
| + | image:lra_h04_002.jpg | ||
| + | image:lra_h04_003.jpg | ||
| + | </gallery> | ||
| + | <li>고정 코일쪽 | ||
| + | <gallery> | ||
| + | image:lra_h04_004.jpg | ||
| + | image:lra_h04_005.jpg | ||
| + | image:lra_h04_006.jpg | 작용 반작용 법칙으로 코일도 진동에 해당되는 힘을 받는다. 그러므로 권선코일은 서로 단단하게 고정되어야 한다. | ||
| + | image:lra_h04_007.jpg | [[열가압 접합]] | ||
| + | </gallery> | ||
| + | <li>가동 분동쪽 | ||
| + | <gallery> | ||
| + | image:lra_h04_008.jpg | ||
| + | image:lra_h04_009.jpg | ||
| + | image:lra_h04_010.jpg | ||
| + | image:lra_h04_011.jpg | ||
| + | </gallery> | ||
| + | <li>의견 | ||
| + | <ol> | ||
| + | <li>샘플-3에 비해 저항이 50%이다. 전류소모가 많다. | ||
| + | <li>10Vosc 인가해도 벽에 부딪히지 않는다. | ||
| + | <ol> | ||
| + | <li>작은 스트로크 및 분동이 가벼운 무게임에도 불구하고 그렇다. | ||
| + | </ol> | ||
| + | <li>진동량이 작을 것인데... 왜?????? | ||
| + | <ol> | ||
| + | <li>진동힘이 작더라도 수평진동 느낌(애플이 채택하고 있기 때문에)이 필요한 곳에 사용하는 듯. | ||
| + | </ol> | ||
| + | </ol> | ||
| + | </ol> | ||
</ol> | </ol> | ||
</ol> | </ol> | ||
</ol> | </ol> | ||
2025년 3월 24일 (월) 11:57 기준 최신판
수평형 LRA 진동모터
- 전자부품
- 수평형 LRA 진동모터
- LRA 진동모터 (Linear Resonant Actuators;LRA;선형 공진 액츄에이터)
- horizontal directions 으로 움직인다.
- leaf spring, weight, permanent magnet, steel yoke, coil
- 손으로 느끼는 진동이 가장 큰 주파수는 150Hz 부근이다.
- LRA 진동모터 (Linear Resonant Actuators;LRA;선형 공진 액츄에이터)
- 샘플-1, 애플 스마트폰 iPhone 11 Pro(2019년 출시)
- 2020년 7월 입수

AS055861 라는 부품번호로 인터넷 판매되고 있음.
- 외관

Taptic Engine, 애플의 상품명



- VCM 드라이브 IC
- 외형
- PCB 관찰


메인보드와 IC간 연결선

IC와 VCM간 연결선. 홀소자용 4개
- 다이 관찰


RDL 제거후

ADI 2016 TW860 A

- 외형
- 테이프 뜯고 분해시작


상면 및 하면 VCM끼리 전선을 서로 연결
- 케이스 윗면을 벗기니


분동(weight)이 좌우 leaf spring에 의해 지지되어 가운데 위치하고 있다.

분동을 한쪽으로 밀었을 때



- 고무 스톱퍼

"긴 스트로크"를 갖는다.

- leaf spring 보강 철판 (정확히 어떤 목적인지???)


양면 테이프를 사용

- 밑면 VCM


상하 VCM은 한 가운데 있다.
- 분동 밑면 관찰



비교적 잘 닦이는 것으로 보아, 자성유체가 아니다. 자석이 녹슬지 말라고 방청유를 바른듯

레이저로 표면 거칠기 가공을 했다. 이유를 모르겠다. (이 거친면을 풀로 발라야야 한다면 뒤집혀 조립되었다.)
- 분동 윗판 분해

레이저 용접

용접이 약하게 되어 있어 비교적 쉽게 떨어진다. 풀칠을 했다.
- 자석 에칭(Nd 자석일 듯)

질산에 자석은 쉽게 애칭된다.

- 샤오미, 삼성, 애플에 적용된 진동모터 크기

외형

분동크기
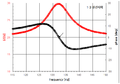
- LCR 미터로 Z-theta를 측정한 엑셀데이터

100~1000Hz,
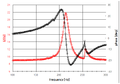
명확한 공진 현상이 일어난다.
공진은 위상이 +에서 -로 변하는 0지점이다. 즉, 214Hz이다. 이 때 임피던스가 가장 크다.
DC 전류를 -0.1~+0.1A 가하면서 임피던스 변화율.
DC 전류에 따른 임피던스 변화를, 당시 수직형 제품과 비교함.
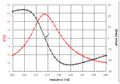
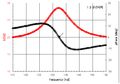
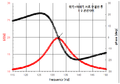
- 온도에 따른 Z 측정 엑셀데이터 , 측정 프로그램 4284all-bas에서 TC Freq Sweep 선택
- 실험 방법
- 실험 결과 그래프

온도프로파일. (온도지정-측정)을 반복하였다.

임피던스
영하에서는 공진이 나타나지 않는다.

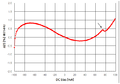
온도에 따른 최고 임피던스와 그 주파수
- 실험 방법
- 2020년 7월 입수
- 샘플-2, 2022/05/05
- 샘플 #1,
- 외형 및 측정을 위해 전선 납땜

Device Parts 판매상 마크 스티커가 붙어 있다.
- LCR 미터로 Z-theta를 측정한 엑셀데이터
207Hz 공진주파수
- 외형 및 측정을 위해 전선 납땜
- (이미 분해된) 샘플 #2



화살표 기구물은 스토퍼(stopper)

- 샘플 #1,
- 샘플-3, Apple Part No.: 610-00636 / GH7GY830DFW0 / 0000L2+85BD3 로 레이저마킹품
- iPhone 15 Prp Max용 Haptic Engine
- 2024/01/11 넥스벨에서 중국에서 구입한 것.
- 봉투 라벨: AS131470, C35-8167-1
- 외관 2024/04/01

TAPTIC engine

레이저마킹 및 파랑잉크도장은

Device Parts 라는 온라인 판매상 회사 마크이다.
- 테이프를 뜯어보면

포론테이프 위면은 동박테이프. 차폐를 반드시 해야 하는 듯.

뜯은 테이프에 IC 및 수동칩 부품이 납땜되어 있다.
- (아래 사진에서) 위쪽 코일 공진특성
- 측정 방법, 움직이지 않게 고정시켜 측정했다.

전선 3개를 각각 1-2-3 선이라면
- 3가지 조합 권선의 20Hz~1MHz 임피던스 특성

1-2

2-3, 1-2 특성과 같다.

1-3, 1-2-3 이렇게 연결되어 있다.
- 1-3 권선에서 공진특성
~132Hz가 공진주파수이다.
100~300Hz 측정
- 측정 방법, 움직이지 않게 고정시켜 측정했다.
- 아래쪽 코일 특성(F-PCB로 연결되어 있다.)
- 1-3 권선에서 공진특성(참고로 1-2 권선은 연결되어 있지 않다.)
~132Hz가 공진주파수이다.
- 1-3 권선에서 공진특성(참고로 1-2 권선은 연결되어 있지 않다.)
- 위쪽+아래쪽 병렬로 연결한 특성(즉, 분해하기 전 정상품에 대한 특성일 듯)
- 1-3 권선에서 공진특성
~132Hz가 공진주파수이다.
- 1-3 권선에서 공진특성
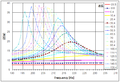
- 인가전압에 따라, 인가전압이 높으면 전류가 많이 흘러 진폭이 커질 때
- 그래프
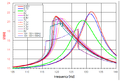
인가 전압이 높아지면 공진주파수가 낮아진다.
벽에 부딪히지 않는 전압은 7.1Vosc이다.
- 의견
- 측정 인가전압이 높으면 진폭이 커진다.
- 인가전압이 낮으면(예 0.1Vosc) 스프링 완전 탄성구간내에서 진동한다.
- 공진주파수 곡선이 좌우대칭이된다.
- 스프링탄성 계수가 가장 작기 때문에, 가장 높은 공진주파수를 갖는다.
- 인가전압이 높으면(예 5Vosc) 스프링 비선형 변형구간에 도달하여 비탄성구간내까지 비틀린다.
- 공진주파수 곡선이 좌우 비대칭이된다.
- 비틀림이 커져 스프링탄성 계수가 크게 나오고, 그래서 가장 낮은 공진주파수를 갖는다.
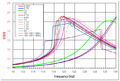
- 그래프
- DC bias -100mA~+100mA에 따른 임피던스 측정 엑셀 파일
- 인가전압에 따라
0.1Vosc
5.0Vosc
10Vosc. 약 120Hz~135Hz 구간에서는 벽에 부딪힌다.
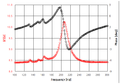
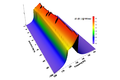
- 인가전압 7.1Vosc에서 (앞 실험에서 7.1Vosc에서 진동체가 벽에 부딪히지 않았다.)
- 그래프
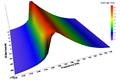
3차원 그래프
2차원 그래프
- 의견
- DC bias current = 0이면 추가 진동 중앙에 위치한다는 뜻이고, -100mA 및 +100mA라면 한 쪽으로 치우친 상태에서 진동한다는 뜻이다.
- 그래프를 볼 때, 추가 정확히 '좌우 대칭으로 균형을 이룬 스프링 강성으로 조립되었다는 뜻이다.
- DC bias current -60mA 및 +60mA를(좌우 대칭값이다.) 넘으면 진동체가 벽에 부딪힌다.
- 그래프
- 인가전압에 따라
- 전체 의견
- 인가되는 사인파 전압이 7Vosc 이하이면 진동체가 벽에 부딪히지 않는다.
- 이 제품은, 아마 진동추가 벽에 부딪히지 않도록 설계, 운영되고 있을 것이다.
- 진동체를 조립한 스프링 강성은 진동의 좌우 대칭으로 만들어져 있다.
- (당연히) 기계적 진동폭이 작으면 고유진동수가 높아지고, 진동폭이 커지면 (탄성계수가 커져) 고유진동수가 낮아진다.
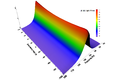
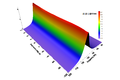
- 샘플-4, 삼성 갤럭시 A54, A546 모델용
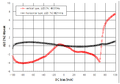
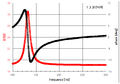
- 임피던스 측정 엑셀 데이터
- 그래프
- 의견
- 10Vosc 전압에도 벽에 부딪히지 않는다.
- +-100mA 바이어스 전류를 추가로 인가해도 크게 벽에 부딪히지 않는다.
- -100mA 바이어스쪽이 +100mA에 비해 그래프가 많이 달라졌기 때문에 비대칭 조립되었다. (아마, 댐핑 고무 때문일 것이다.)
- 공진임피던스가 10Ω이므로 10Vosc가하면 1A흐른다. DC bias로 -0.1A 또는 +0.1A 추가해도 대세에 지장이 없다.
- 10Vosc 전압에도 벽에 부딪히지 않는다.
- 그래프
- 외관, AS129484, 제조회사는 중국 AAC로 추정한다.
- 용접된 4변을 그라인더로 갈아내면
- 고정 코일쪽


작용 반작용 법칙으로 코일도 진동에 해당되는 힘을 받는다. 그러므로 권선코일은 서로 단단하게 고정되어야 한다.
- 가동 분동쪽
- 의견
- 샘플-3에 비해 저항이 50%이다. 전류소모가 많다.
- 10Vosc 인가해도 벽에 부딪히지 않는다.
- 작은 스트로크 및 분동이 가벼운 무게임에도 불구하고 그렇다.
- 진동량이 작을 것인데... 왜??????
- 진동힘이 작더라도 수평진동 느낌(애플이 채택하고 있기 때문에)이 필요한 곳에 사용하는 듯.
- 임피던스 측정 엑셀 데이터
- 인가되는 사인파 전압이 7Vosc 이하이면 진동체가 벽에 부딪히지 않는다.


























































































