ML-7110B, 갈바노미터 거울
ML-7110B, 갈바노미터 거울
- 전자부품
- 광 관련
- 참고
- 기술 정보
- 위키페디아
- Galvanometer https://en.wikipedia.org/wiki/Galvanometer
- Mirror galvanometer https://en.wikipedia.org/wiki/Mirror_galvanometer
- Laser scanning https://en.wikipedia.org/wiki/Laser_scanning
- Chiba Precision 회사 및 제품 설명에서
- 회사 역사
- 1979년 Chiba Precision Co., Ltd. 설립
- 2007년 Citizen이 인수하여, 회사이름을 Citizen Chiba Precision Co., Ltd. 로 변경
- 기술
- 선택은 스캐너 거울면적과 스캔 각도로 결정된다.
- 스캔각도: +-10도 이내로 선형성을 유지한다. +-20도까지 기계적으로 돈다.
- 용어
- 스캐너:scanner라고 함은 아래 3가지로 구성된다.
- 거울:mirror
- 모터:motor - 코어리스 모터 구조로 응답이 빠르고 정확한 각도제어가 가능하다.
- 엔코더:position detector
- 2022년도에는 optical analog sensor를 사용한다. 디지털 엔코더 제품은 만들지 않는다.
- 고해상도 디지털 엔코더는 노이즈와 온도변화에 무관한 장점이 있다.
- 거울반사형 아날로그 엔코더에 비해 무거워 관성이 크고, 신호 변환에 시간이 오래 걸려 고속동작에 불리하다. 그리고 가격이 비싸다.
- 거울에 레이저 광선을 조사하여 각도(수광소자에서 해당되는 전압으로)를 검출한다.
- 모터와 엔코더 선형성을 교정해야 하므로 드라이버에서 이를 보정하므로, 드라이버와 함께 짝을 맞춰 공급한다.
- 2022년도에는 optical analog sensor를 사용한다. 디지털 엔코더 제품은 만들지 않는다.
- 스캐너:scanner라고 함은 아래 3가지로 구성된다.
- Galvanometer Optical Scanner 모델명, SCM2242-2400 (2022년 생산모델 2260과 모터 직경이 유사)
- 4자리 번호에서 첫 두자리는 스캐너 거울 직경이다. 즉, 22이다. 약 10mm 정도의 레이저 빔 직경을 사용한다.
- -2400에서 2는 +-20도 각도이다.
- 2022년 생산모델 2260은 반복성 9urad을 갖는다. (pi 라디안은 180도이므로 0.5밀리도를 갖는다.
- 회사 역사
- 위키페디아
- 레이저 마킹기 헤드(광학계)에서 2015/04/01
- 갈바노 거울 메커니즘, 2015/04/01
X,Y 스캐닝을 위한 갈바노미터 모터 2개

모터 2개를 위한 제어보드

갈바노 Chiba Precision, SCM2242-2400

갈바노 거울
- 2015/12/16 2호기 청소하면서
- 사용 렌즈, f-Θ lens, condenser lens, focusing lens, flat field lens 등으로 불린다.

촛점렌즈 FT-100, 1064nm
- 2015/12/16 2호기 청소하면서
- 갈바노 거울 메커니즘, 2015/04/01
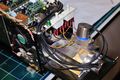
- 2022/05/30 헤드 분해
- 제어기. 여기서 두 드라이버를 구동시킨다.
- 갈바노 거울 드라이버, Chiba Precision Co., Type: SCD-W15-1121-BA ver 2
- 전체


플라스틱 나사, 왜 사용할까?
- 바이메탈 TCO 스위치, Airpax 67L080 TO-220형 Bimetal Disc Thermostat

J222/K3148 MOSFET
- 갈바노 모터와 연결되는 커넥터
- 회전이동 다회전 가변R


가변R 분해
- 래디얼퓨즈

퓨즈 Royal FRPU 5A
- 전체
- 스캐너 분해, 1호기에서
- 외형
- X,Y축으로 이동시킬 수 있는 레이저 반사 경로
- 기구분해
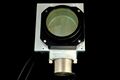
- 엔코더 회로 분해
- 정전용량식(?) 아날로그 엔코더
- 외형
- 모터 임피던스 분석.
- LCR 미터로 임피던스 측정 엑셀 파일,

95Hz에서 공진이 일어난다.
- LCR 미터로 임피던스 측정 엑셀 파일,
- 모터에 삼각파를 인가할 때, 모터에서 발생되는 Back EMF.
- 모터 전선 2개에 연결된 오실로스코프 파형

부드럽게 회전하면 Back EMF가 나타나지 않는데, (기계적인 회전 마찰에 의해) 갑자기 가속, 감속되면 나타난다.
- 모터 전선 2개에 연결된 오실로스코프 파형
- 동영상
- 동영상-1, 함수발생기로 삼각파형을 만들어 모터를 가동시킴. 주파수가 낮을 때는 Back-EMF가 관찰됨.
- 동영상-2, 약 60Hz까지 의도된 각도만큼 회전함. 100Hz 근처에서는 관성력 때문에 회전하지 않음. LCR 미터로 측정한 공진점과 거의 일치함.
- 동영상-1, 함수발생기로 삼각파형을 만들어 모터를 가동시킴. 주파수가 낮을 때는 Back-EMF가 관찰됨.
- 제어기. 여기서 두 드라이버를 구동시킨다.
































